Сейчас мы готовимся к соревнованиям роботов в Политехническом музее. Здесь мы будем обсуждать процесс сборки и разработки ПО для нашего робота.
Интересные статьи по этой теме:
- The line following sensor of Rigel
- Line Follower ROBOT
- Building Line Following and Line Maze Courses
- EyeBo - The Line Following Robot
- Autonomous visually steered car (video1, video2, video3) hackaday
- Desktop Line Following Robot
- OpenCV Open Source Computer Vision - наш выбор!
- CMUcam3: Open Source Programmable Embedded Color Vision Platform
- Vision-based Line following program
- Line Following using Vision Processing
- The Hypermedia Image Processing Reference
На сайте Политехнического музея опубликованы регламенты соревнований. Нас интересует Линия проф.
01. Полигон для этой дисциплины.

02. Отдельные участки трассы имеют разный рисунок.

UPD 09.01.2012
01. Внешний вид робота

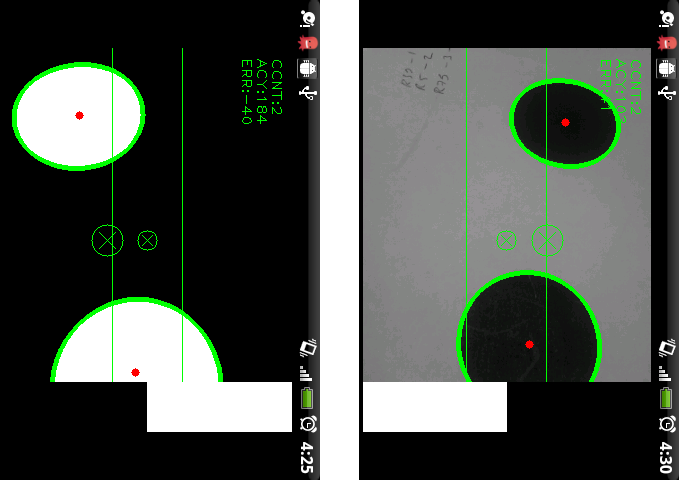
В этой версии робота общение смартфона с контроллером ROBO TX происходит следующим образом: В нижней части экрана смартфона зарезервировано поле, в котором отображаются два белых прямоугольника. Зажиганием прямоугольников управляет алгоритм регулятора, который следит за маршрутом. Левый прямоугольник зажигается, когда надо поворачивать влево, ну а правый, соответственно, когда надо поворачивать вправо. Над смартфоном закреплены два сенсора, которые реагируют на уровень освещенности под ними. Эти сенсоры передают сигналы в контроллер ROBO TX, который уже управляет моторами робота.
02. Наш заезд на соревнованиях в Политехничесокм 09.01.2012. В конце робот зацепился за препятствие "стиральная доска" и до финиша не дошел.