Внутренности контроллера ROBOTICS TXT
Всем привет!
Сегодня на мой рабочий стол попал новенький конструктор FISCHERTECHNIK 524328 «Набор первооткрывателя» с программируемым контроллером ROBOTICS TXT. Краткие технические характеристики этого контроллера нам уже известны из поста «Программируемый контроллер ROBOTICS TXT», но этого, определенно, недостаточно для ответа на вопрос, который нас интересует, – «что же там у него внутри?». Поэтому я предлагаю распаковать конструктор, вскрыть корпус контроллера и попробовать найти ответ на обозначенный выше вопрос.
01. Открываем коробку.

02. Внутри два контейнера из тонкого белого пластика, инструкция, диск с ПО ROBO Pro и, конечно же, пакетики с деталями FISCHERTECHNIK.

03. Про конструктор и его возможности я сделаю отдельный пост, а сейчас давайте перейдем непосредственно к предмету этого обзора.

04. Контроллер ROBOTICS TXT и сервомоторы для масштаба.
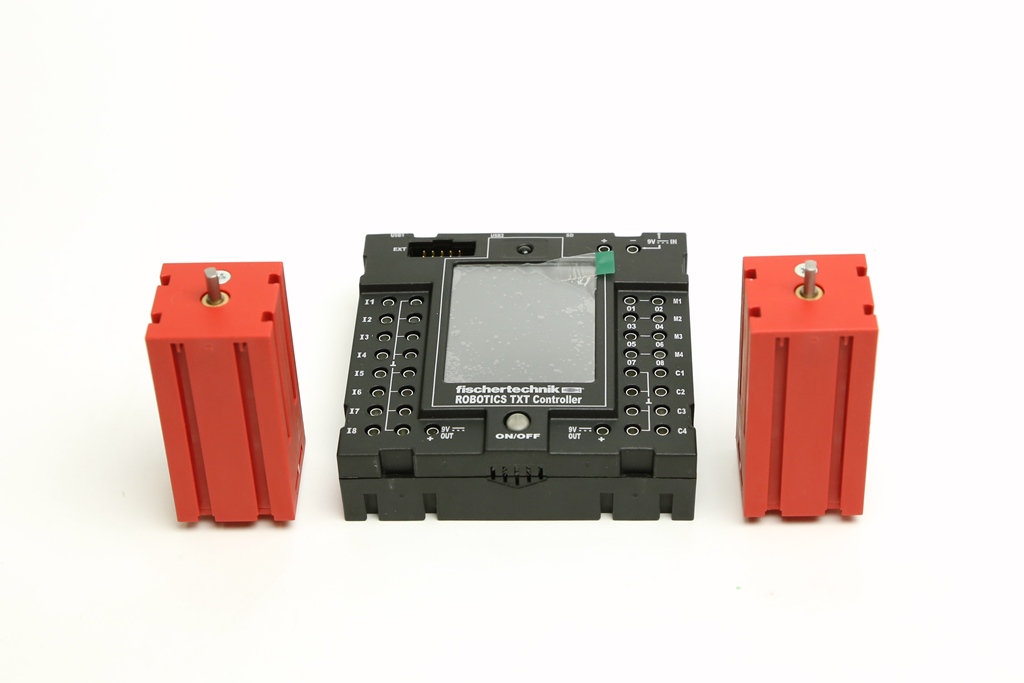
05. Корпус контроллера TXT сделан из черного пластика и имеет такие же габариты по длине и ширине, как и ROBO TX – 90х90 мм. При этом он немного выше. Его высота составляет 25 мм. На нижней и боковых поверхностях имеются пазы для присоединения деталей конструктора. Таким образом контроллер может выступать в роли несущего элемента в ваших конструкциях.

06. На верхней боковой поверхности установлены разъемы для подключения различных устройств (слева направо): разъем для подключения блока питания 9В, слот для micro-SD флэш-карты, mini-USB для подключения к компьютеру, USB тип A для подключения дополнительных устройств с USB интерфейсом.

07. На нижней стороне корпуса находится съемная крышка, сняв которую можно получить доступ к литиевой батарейке CR2032. Она нужна для того чтобы часы реального времени контроллера не сбрасывались каждый раз при выключении питания.

08. Верхняя крышка корпуса держится на четырех защелках, которые достаточно легко открываются обыкновенной плоской отверткой. Снимаем её.

09. Вся электроника внутри корпуса размещается на двух печатных платах. Одна плата занимает по размерам весь корпус. Будем называть её П1. Вторая плата (П2) немного меньше, она соединяется с П1 через штыревой разъем с 36 контактами.
Платы П2 и П1.
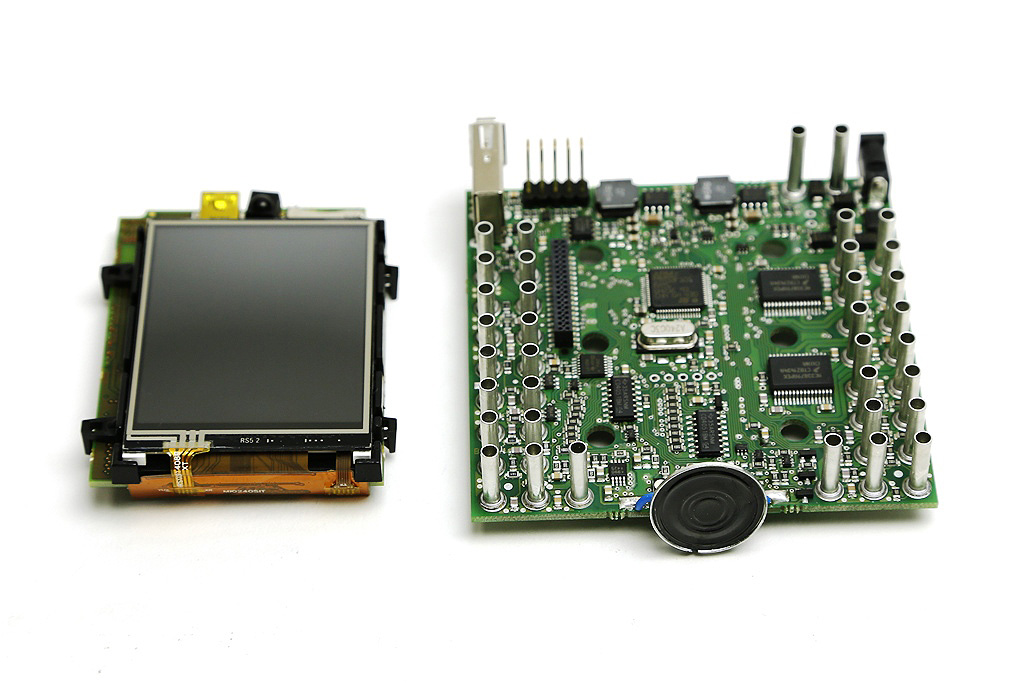
10. На плате П2 закреплен жидкокристаллический TFT дисплей MI0240S1T с диагональю 2,4’’ и разрешением 320×240 пикселей. Дисплей оборудован резистивным тачскрином. Для подключения к плате используется гибкая печатная плата и разъем. Также на плате П2 установлен ИК-приемник для дистанционного управления. Он совместим с пультом управления из набора для дистанционного управления.

11. Печатная плата П1.
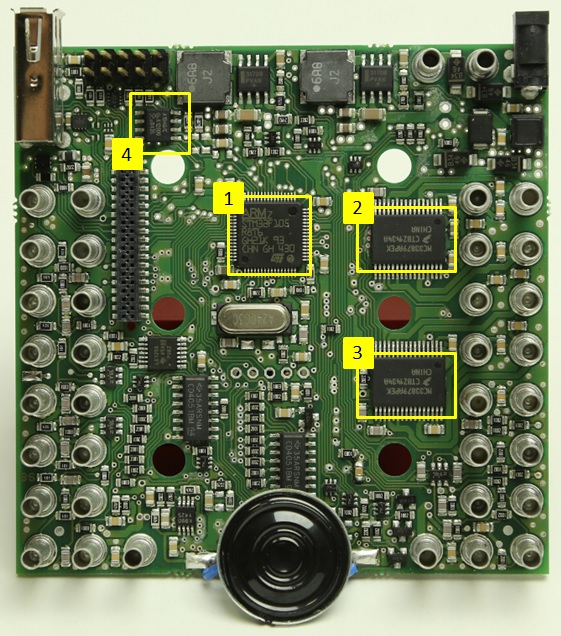
На печатной плате П1 установлен микроконтроллер STM32F105R8T6 (1) с ядром ARM Cortex-M3. Он выполняет всю работу, связанную с вводом, выводом и обработкой сигналов.
Также на плате распаяны два чипа MC33879 (2 и 3) – это драйверы, которые управляют выходами O1-O8 контроллера. Каждый драйвер отвечает за 4 выхода «О».
Еще две микросхемы CD4051BM (4 и 5) – это мультиплексоры, которые используются для коммутации аналоговых сигналов. Входы мультиплексоров соединены с гнездами I1-I8.
В левом верхнем углу платы распаяны два разъема: USB тип A и штыревой разъем EXT на 10 пинов. Через разъем USB к контроллеру TXT можно подключать различные устройства с интерфейсом USB. Разъем EXT используется для подключения модулей расширения. Также обратите внимание на чип TJA1040 – это шинный формирователь последовательного интерфейса CAN. Этот чип обеспечивает скорость передачи данных до 1 Мбит/c.
К контактным площадкам в нижней части платы припаян динамик, через который можно воспроизводить различные звуки.
12. Печатная плата П2.
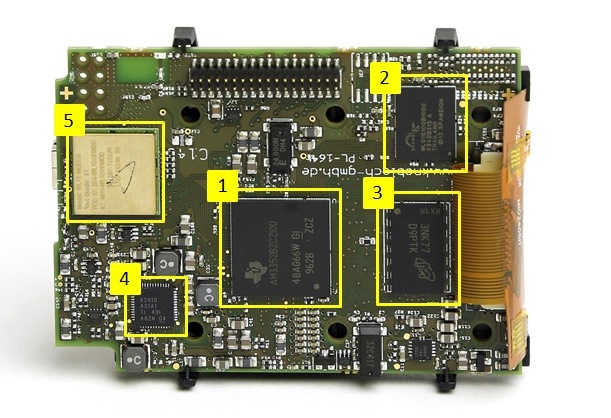
Печатная плата П2 устанавливается сверху на плату П1 и соединяется с ней через 36 контактный штыревой разъем. По размеру П2 немного меньше чем П1.
К П2 с помощью гибкой платы с проводниками через разъемы подключается цветной жидкокристаллический TFT дисплей MI0240S1T с диагональю 2,4’’ и разрешением 320×240 пикселей. Дисплей оборудован резистивным тачскрином.
На плате П2 установлен процессор TI Sitara AM3352B (1) с ядром ARM Cortex-A8 и чипы DDR и FLASH памяти: 128Мбайт Samsung K4B2G DDR3L 1600 DRAM (3) и 64Мбайт Spansion ML01G100 SLC NAND FLASH (2) соответственно.
Чип TPS65910 (4) – это модуль управления питанием. Он содержит импульсные преобразователи и стабилизаторы для формирования напряжений питания 1,1; 1,35; 1,8; 3,3 и 5 В для микроконтроллеров и памяти.
Еще один интересный чип на плате – WL18MODGB (5) комбинированный WiFi + Bluetooth модуль. WL18MODGB поддерживает спецификацию 802.11n/b/g и технологию Bluetooth 4.0 и Bluetooth LE.
На этом я хочу закончить обзор аппаратной части контроллера ROBOTICS TXT. Буду рад ответить на ваши вопросы. Следующая публикация будет о программном обеспечении контроллера и в частности об операционной системе с ядром Linux, которая предустановлена на контроллер TXT.



