«Яйцебот» из конструктора FISCHERTECHNIK
Дорогие друзья!
Одним солнечным апрельским утром, листая журнал FT Pedia, мы обнаружили интересную статью про робота, способного наносить изображения на куриные яйца.

После небольшого исследования выяснилось, что идея не нова, и повторять конструкцию из статьи было бы слишком скучно. В итоге у нас появился план сделать полноценный производственный участок для праздничного оформления яиц. Ведь у нас есть столько возможностей для этого! Но сперва немного истории…
История яйцебота
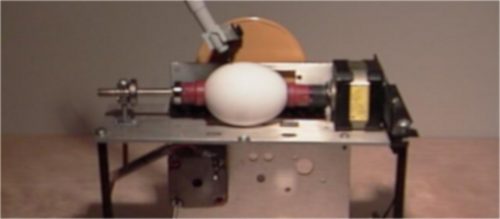
Первый известный человечеству яйцебот появился весной 1990 года. Автором идеи является Брюс Шапиро – изобретатель и преподаватель естественных наук, художник по управляемым механизмам.
Началось всё с интереса к управлению шаговыми двигателями с помощью компьютера. Первоначальная конструкция была достаточно проста и была способна рисовать на круглых предметах. А поскольку приближалась Пасха, очевидным холстом были яйца.
С тех пор Брюс создал множество произведений искусства и торговых автоматов, в том числе постоянные инсталляции в США и Европе. Он даже создал версию яйцебота, способного рисовать в высоком разрешении, получившего название Ovagraph. Для Брюса движение с компьютерным управлением – это не только новый рубеж в искусстве, но также и отличный обучающий инструмент. Он вел классы в Музее науки Миннесоты, Сан-Франциско Эксплораториум и других местах, используя яйцебота для обучения электронике, программированию и робототехнике. Для подготовки к этим занятиям требуется много работы, но отзывы всегда потрясающие.
Одна из целей яйцебота – научить электронике, механике и программированию, необходимому для создания ваших собственных проектов управления движением.
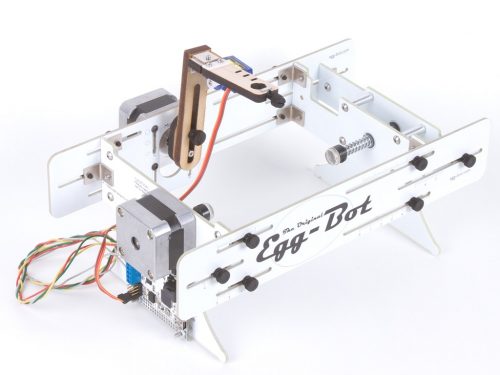
В 2009 году Брюс объединился со своим сыном Беном Тромбли и Брайаном Шмальцем, чтобы превратить яйцебота в комплект для домашней сборки. Брайан, инженер по встроенным системам, создал плату EggBotBoard, которая соединяет яйцебота с компьютером через USB. Бен был недавним выпускником Стэнфордского университета по информатике и создал первую версию программного обеспечения, которое позволяет создавать рисунки в графическом редакторе Inkscape и наносить их на яйцо. Подробную информацию о проекте можно найти на сайте www.schmalzhaus.com.
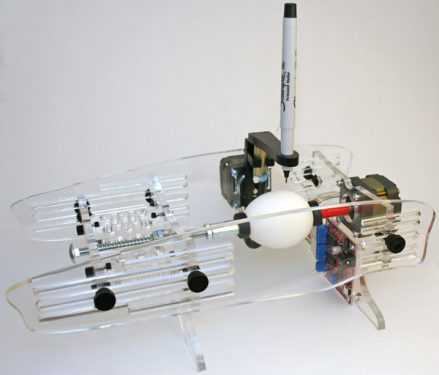
В 2010 году команда Eggbot объединила усилия с Винделлом Оскей и Ленором Эдман из Evil Mad Scientist Laboratories, чтобы представить новый комплект Eggbot 2.0 – новую версию с рядом усовершенствований, упрощающих получение отличных результатов с помощью Eggbot.
Вернёмся к нашей конструкции. После продолжительной дискуссии было решено, что производство праздничных яиц будет состоять из трёх участков:
- Участок хранения (карусельный механизм);
- Манипулятор с механическим захватным устройством;
- Станок ЧПУ для нанесения рисунка на яйца.

Система управления
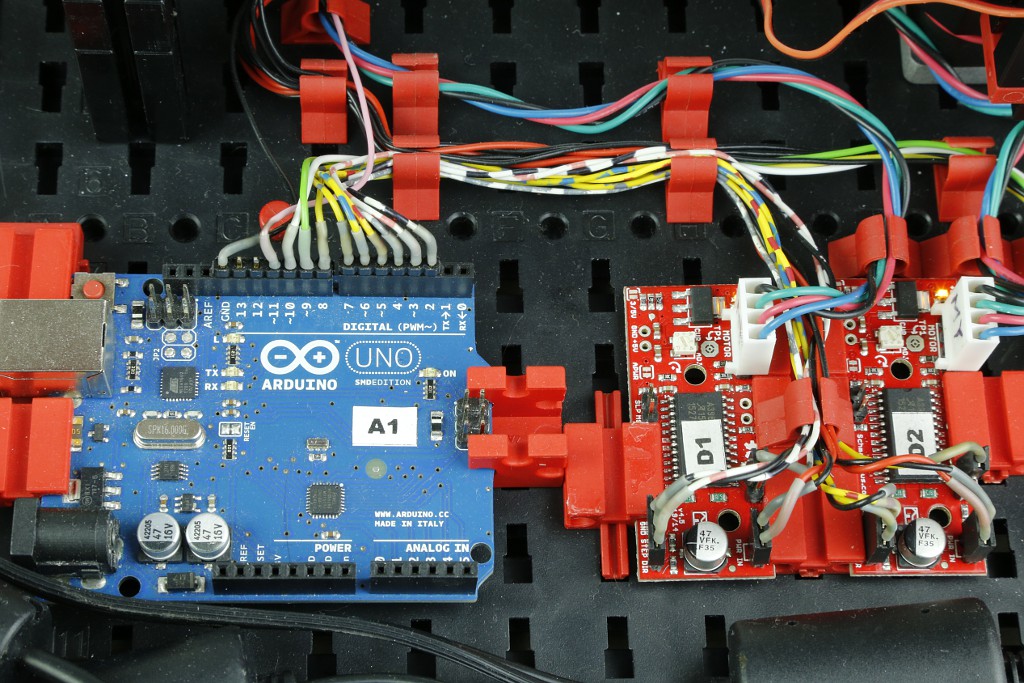
Система управления станком состоит из платы Arduino Uno и двух драйверов шаговых двигателей EasyDriver.
Система управления манипулятором и карусельным механизмом состоит из двух TXT контроллеров (522429). Первый контроллер исполняет основную программу управления, второй контроллер служит для расширения количества входов/выходов первого контроллера.
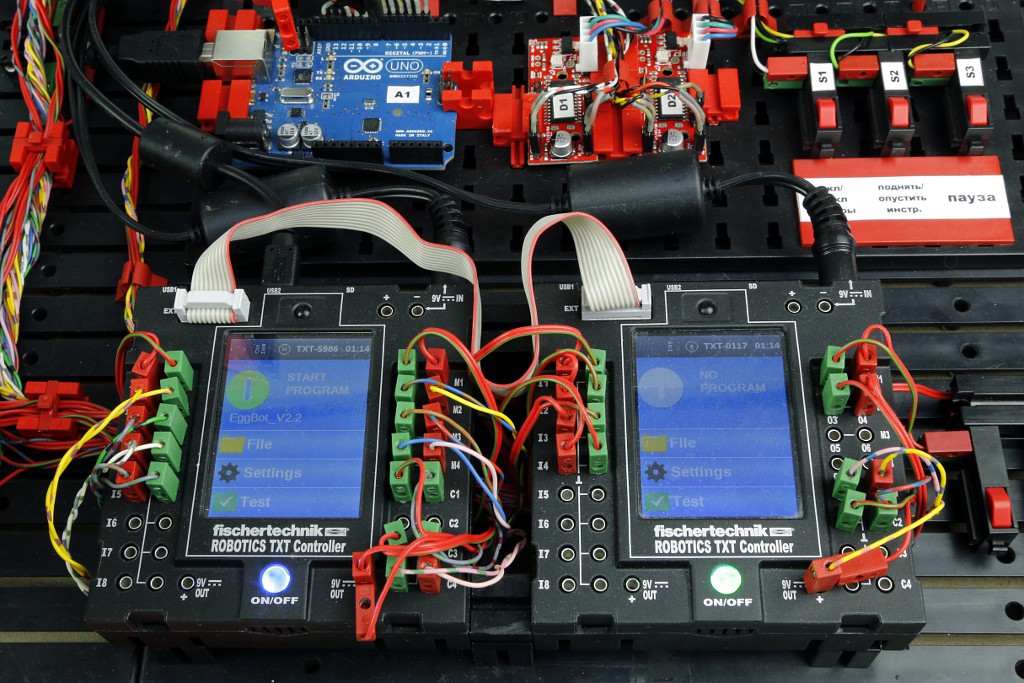
Запуск программы нанесения рисунка на яйцо осуществляется с помощью расширения, установленного в векторном редакторе Inkscape, написанного на языке Python. Управление манипулятором и карусельным механизмом осуществляется в online режиме в среде ROBO Pro.
Станок ЧПУ

В качестве приводов как нельзя лучше подошли шаговые двигатели из набора fischertechnik «3D принтер». В сравнении с моторами с энкодером, шаговые двигатели обеспечивают очень точное позиционирование, что важно для станков с ЧПУ. Но есть важный нюанс – нельзя превышать нагрузку больше, чем момент «удержания» вала двигателя. Шаговые моторы в обычном исполнении не имеют датчиков обратной связи – если произойдёт «пропуск шагов» в результате чрезмерной нагрузки, контроллер не сможет это скомпенсировать и процесс обработки на станке придётся запускать заново.
Всего потребуется два шаговых двигателя: один для вращение яйца и второй для перемещения рабочего инструмента – маркера или карандаша.
Осуществлять поднятие/опускание рабочего инструмента будем с помощью сервомашинки fischertechnik (132292).
Задняя бабка станка приводится в движение мотором с энкодером (153422). По команде управляющей программы мотор приводит в движение червячную передачу, с помощью которой подпружиненный упор фиксирует яйцо.
Крепление рабочего инструмента выполнено оригинально – из червячной передачи с малым шагом, и конструктивно представляет собой струбцину. Это даёт возможность фиксировать пишущий инструмент разной толщины.
Карусельный механизм
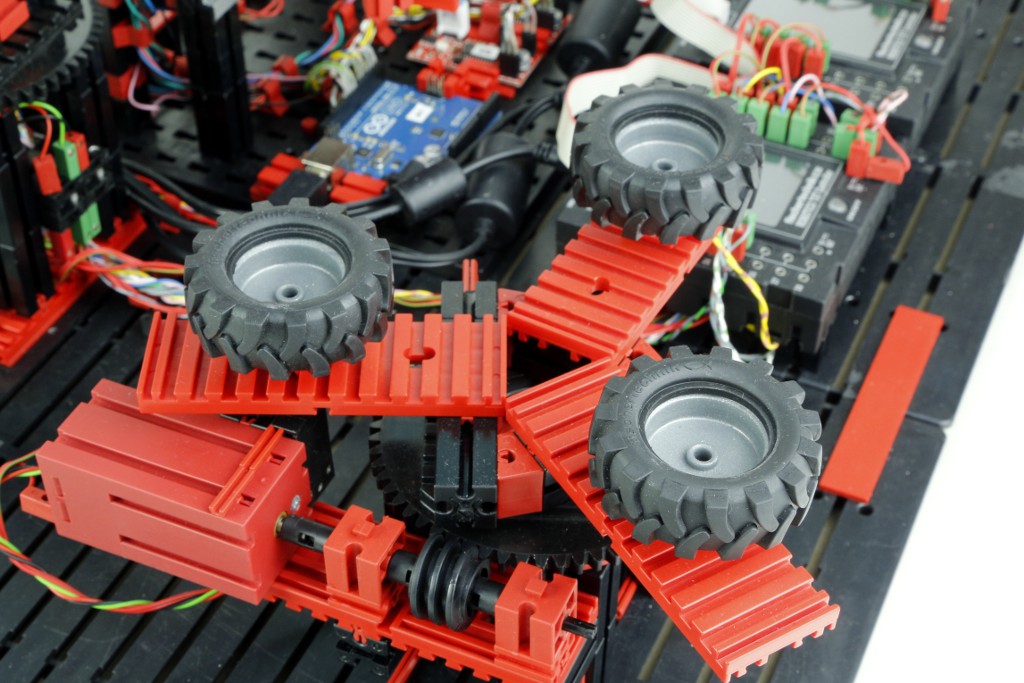
Было решено изготовить систему хранения карусельного типа. Подобный принцип механизма применяется в промышленных обрабатывающих центрах для хранения оснастки и автоматизированной установки.
Вращение карусели осуществляется посредством мотора с энкодером. В качестве подставок для яиц отлично подошли резиновые колёса.
Манипулятор с механическим захватным устройством

Конструкция манипулятора практически повторяет робота с поворотным захватом из набора «ROBO TX Автоматические роботы» (511933) за исключением небольших изменений.
Был заменен двигатель привода поворота захватного устройства c мотора XS (137096) на более мощный мотор (153422). Яйцо – достаточно тяжелый предмет, и для изменения положения захватного устройства требуется достаточное усилие.
Технические характеристики яйцебота fischertechnik
Питание:
- Адаптер fischertechnik ROBOTICS 9V 2.5A (505287) 2 шт.;
- Адаптер 5В 2,25А.
Мотор с энкодером:
- Количество: 5 шт.;
- Номинальное напряжение: 9 В;
- Номинальный ток: 0,386 А;
- Номинальный момент: 10,9 Н*см;
- Скорость вращения: 105 об/мин;
- Передаточное число редуктора: 21,1:1.
Шаговый двигатель:
- Количество: 2 шт.;
- Количество фаз: 2;
- Номинальное напряжение: 4,62 В;
- Номинальный ток: 0.7 А;
- Количество шагов на оборот: 200;
- Шаг: 0,9°;
- Момент удержания: 0.105 Nm.
Описание процесса
- Захват яйца манипулятором из ячейки карусельного механизма;
- Перемещение яйца к шпинделю станка;
- Фиксация яйца задней бабкой;
- Запуск процесса нанесения рисунка;
- После окончания процесса нанесения рисунка, захват яйца манипулятором;
- Перемещение задней бабки в исходное положение;
- Перенос яйца манипулятором в ячейку карусельного механизма;
- Поворот карусельного механизма в следующее положение для захвата нового яйца.
Поздравляем вас с наступающими праздниками!
Список внешних источников
- Till Harbaum, Eierlei mit fischertechnik, ftpedia Heft 1/2020, стр. 30-35
- History of the EggBot
- Software for The Original EggBot
- Исходные коды нашего проекта на GitHub




Очень интересно :)
Спасибо, мы старались