Если вы начинаете изучать разработку приложений для встраиваемых компьютеров, то, скорее всего, вам понадобится неограниченный доступ к операционной системе, установленной на встраиваемом компьютере, с которым вы будете проводить эксперименты. В нашем случае таким учебным компьютером будет контроллер TXT, который входит в состав конструктора «TXT Набор первооткрывателя» (арт. 524328).
Контроллер TXT работает под управлением операционный системы Linux, в которой самый высокий уровень доступа по умолчанию принадлежит пользователю root. Следовательно, для неограниченного доступа к ресурсам операционной системы нам надо получить пароль этого пользователя.
Далее я приведу последовательность действий, выполнив которые, вы сможете узнать пароль пользователя root и получить неограниченный доступ к контроллеру TXT.
 |
Перед тем как перейти к практической части я должен вас предупредить, что действия, выполненные пользователем root, могут привести к повреждению файлов операционной системы и как следствие к нарушению работоспособности контроллера TXT. В этом случае для восстановления нормальной работы контроллера вам придется самостоятельно восстановить образ операционной системы во flash-памяти контроллера. |
Получаем root-доступ
1. Подключите контроллер TXT к компьютеру через интерфейс USB.
2. Проверьте версию системного ПО контроллера TXT в меню «Settings->Info». Должно быть не ниже 4.4.4. Если у вас старая версия системного ПО, то следует обновиться с помощью ROBO Pro. Обновление ROBO Pro можно скачать на сайте fischertechnik.
3. В TXT в меню «Settings->Security» включите опцию «SSH Daemon»:
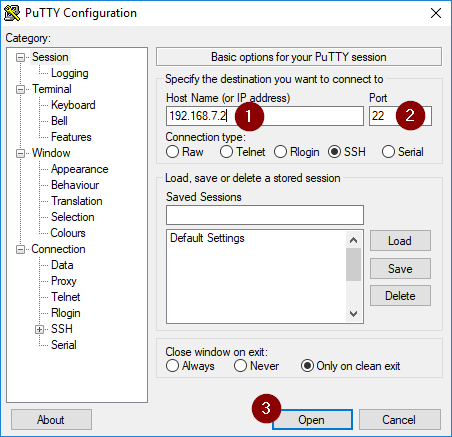
4. Подключитесь к консоли TXT через SSH. В качестве SSH клиента я рекомендую использовать популярную программу Putty. Реквизиты для подключения:
- IP адрес: 192.168.7.2
- Порт SSH: 22
5. Когда откроется консоль надо войти в систему как пользователь ROBOPro:
- Пользователь: ROBOPro
- Пароль: ROBOPro
6. После успешного входа запустите в командной строке скрипт, который генерирует новый пароль для пользователя root:
$ sudo /usr/sbin/new_root_password.sh 60
7. Примерно через 30 секунд на экране TXT появится окно с паролем для пользователя root. Запишите его или сфотографируйте. Он понадобится вам на следующем шаге.
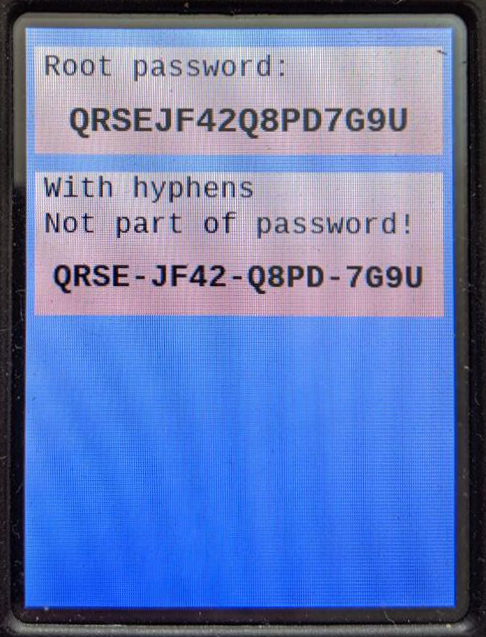
8. Теперь у вас есть пароль. Можно войти в систему как пользователь root:
Если вам не хочется постоянно вводить длинный пароль, то вы можете установить собственный. Для этого выполните команду passwd root:
$ passwd root
Если в момент запуска passwd вы были зарегистрированы под другим пользователем, то система попросит вас ввести текущий пароль пользователя root (его вы уже знаете), а затем надо будет два раза ввести новый пароль.
Список использованных источников и литературы
- TXT ROOT access. URL: https://github.com/fischertechnik/FT-TXT/blob/master/TXT-Linux-FAQ.md
- Обновление RP 4.4.4. URL: https://www.fischertechnik.de/en/service/downloads/robotics
- fischertechnik TXT Firmware. URL: https://github.com/fischertechnik/FT-TXT
- PuTTY: a free SSH and Telnet client. URL: https://www.chiark.greenend.org.uk/~sgtatham/putty/






![ПЛК110-24.60.Р-М[М02]](https://pacpac.ru/ft-blog/wp-content/uploads/2019/03/plk110-60_m02.jpg "Овен ПЛК110-24.60.Р-М[М02]")
![ПЛК110-24.30.Р-М[М02]](https://pacpac.ru/ft-blog/wp-content/uploads/2019/03/plk110-30_m02-468x375.jpg "Овен ПЛК110-24.30.Р-М[М02]")







