26 июля 2015 года компания FISCHERTECHNIK будет праздновать своё 50-летние. На празднике будут много говорить о первых конструкторах, о падениях и взлетах, о планах на будущее. Особым гостем этого мероприятия будет Артур Фишер – создатель конструктора FISCHERTECHNIK, человек, с чьим именем связано более 1100 интересных изобретений. Биография этого изобретателя богата интересными событиями, о которых я вам сегодня расскажу.

Артур Фишер родился 31 декабря 1919 года в небольшом селе Тумлинген в юго-западной части Германии. С ранних лет он увлекался техническим творчеством, и поэтому родители в 1930 году отправили его в ремесленное училище. С 1933 по 1937 года юный Артур Фишер обучался на слесаря в Штутгарте. В 1938 году он был призван на военную службу и вернулся в родные края лишь в 1946 году.
Период с 1947 по 1948 год был насыщен событиями. В 1947 году он устроился на работу ассистентом в инженерное бюро, которое занималось проблемами управления движением воздушного транспорта Германии. Однако, проработав в бюро меньше года, уже в следующем году Фишер решил заниматься исследованиями самостоятельно и открыл свою компанию «Artur Fischer Apparatebau Hörschweiler». Эти события проходили одновременно с изменениями в его личной жизни. В 1947 году он женился, а в 1948 году у него родилась дочь Марго.
Первое его известное изобретение появилось случайно. На Рождество 1948 года, он хотел сделать фотографию с шестимесячной дочерью, для чего нанял фотографа. Тот использовал контейнер, наполненный смесью магния и калия, для дополнительного освещения во время съемки. При поджигании смесь горела настолько сильно, что возникала серьёзную опасность пожара. Тогда Фишер задумался о безопасности такого способа освещения. Он предположил, что яркий свет нужен фотографу лишь в то мгновение, когда делается снимок. Поэтому вместо магниевой смеси можно использовать электрическую лампу, а электрический контакт вспышки необходимо было синхронизировать с затвором фотоаппарата – именно это должно было помочь сделать работу фотографа менее пожароопасной.

Спустя шесть месяцев после Рождества, он запатентовал своё первое изобретение — электрическую синхронную вспышку для фотоаппарата. Презентация изобретения прошла на выставке в Мюнхене 9 июля 1949. В 1950 рыночные перспективы вспышки были оценены фирмой AGFA (одного из ведущих производителей фотоматериалов в Германии на тот момент), которая заключила контракт с Артуром Фишером на производство нового товара. В тот год, помимо успехов в работе, у Фишера произошло ещё одно счастливое событие в семье — родился сын Клаус.
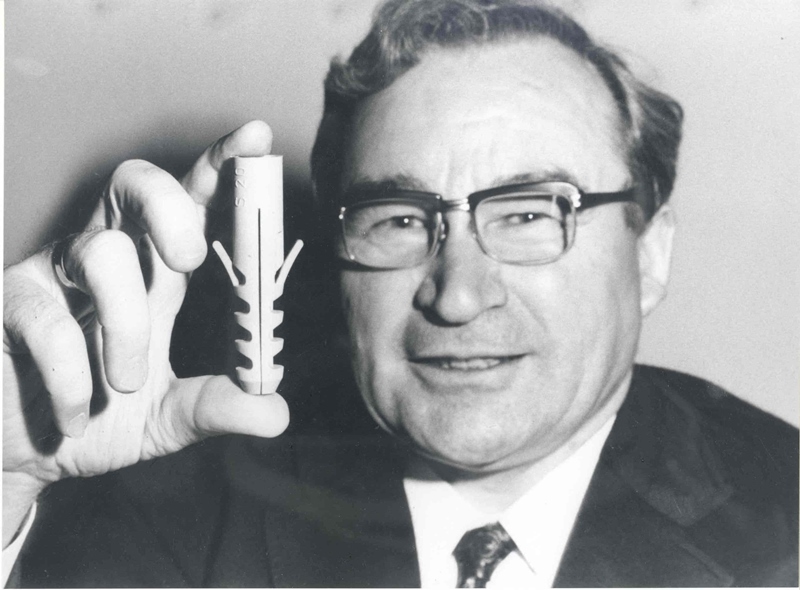
8 ноября 1958 года – Артур запатентовал изобретение, которое и сейчас пользуется большой популярностью во всем мире – пластиковый строительный крепёж «Дюбель». Его изобретение по достоинству оценили, не только в Германии, но и далеко за её пределами, — в 1962 году «Artur Fischer Apparatebau Hörschweiler» сотрудничала с компаниями из Франции, Бразилии, Испании и Италии.
Следующее изобретение Фишера, которое получило мировую популярность, появилось в 1965 году и оно тоже связано с рождественскими праздниками. Артур решил подготовить необычный рождественский подарок для инженеров и партнёров компании. Для этого он разработал и запатентовал конструктор, который состоял из однотипных пластиковых деталей, которые могли соединяться между собой с помощью соединения типа «ласточкин хвост». Эти конструкторские наборы получили много положительных отзывов, в результате чего, компания решила наладить массовое производство новых товаров. В том же году Артур Фишер передал первую партию из 1000 наборов в благотворительный фонд «Sorgenkind». На комплектах было написано название нового конструктора – FISCHERTECHNIK.

Производство компании «Artur Fischer Apparatebau Hörschweiler» продолжало расти, и к 1969 году её оборот достиг 40 млн марок. В 1976 году Фишер передал управление компанией своему сыну — Клаусу. При этом сам остался в компании и полностью посвятил себя науке и изобретениям. Из множества его работ того времени можно выделить, например, «Дюбель для фиксации костей при переломах» (1970г.) и «Систему для хранения аудио- и видео-кассет» (1981г.), которые в последствии стали использоваться не только в Германии, но и за рубежом.
За свои изобретения Артур Фишер был представлен к множеству наград, среди которых особое место занимает премия в области технической науки в Германии — «The Werner von Siemens Ring» (1990г.). А в 2014 году он стал лауреатом европейской премии «European Inventor Award» в номинации «Жизненные достижения».

В начале 2000-х Фишер решил вплотную заняться вопросами популяризации науки. Специально для этого в 2002 году он основал фонд «Artur Fischer Erfinderpreis». Каждые два года фонд присуждает денежные премии школьникам и студентам за особые успехи в научной деятельности. 28 февраля 2015-го состоялась восьмая церемония награждения, премиальный фонд которой составил 36 тыс. евро.
В 2014 году Артуру Фишеру исполнилось 95 лет. Каждый день он продолжает ходить на работу в свой офис. Не смотря на то, что ему уже нелегко передвигаться самостоятельно, он сохраняет позитивный настрой и зачастую отвергает помощь, говоря: «Я наклоняюсь вперед, чтобы не упасть назад. Это всё физика!».
Выдающийся изобретатель по-прежнему посещает научные мероприятия и выставки. Он говорит, что ему нравится атмосфера, в которой происходят обсуждения последних изобретений и открытий.
«Если мы не будем изобретать что-то новое, значит, ничего нового и не произведем!» — эти слова Артура Фишера отлично раскрывают его самого, как человека, всю жизнь стремившегося создавать новое.
Подробнее о том, чем в настоящее время занимается Артур Фишер, вы можете узнать из следующего видео: Artur Fischer — Wall plug, synchronised flash and many more.

При подготовке статьи использовались материалы с сайтов: