Дорогие друзья!
Как вы знаете, FISCHERTECHNIK каждый год выпускает новые модели конструкторов, а также обновляет существующие наборы. В этом году изобретатели из г. Вальдахталь не отступают от сложившейся практики и анонсируют шесть новинок в разных категориях:
- 533872 PROFI Dynamic M
- 533873 PROFI Dynamic Tuning Set
- 533877 PLUS LED Set
- 533874 PROFI Pneumatic Power
- 533875 PROFI Solar Power
- 533876 ROBOTICS Mini Bots
Динамика М
 Новые элементы механизации и звуковые устройства в уже знакомом вам наборе «Динамика» позволяют строить разные удивительные маршруты для шариков. Скатываясь вниз под действием силы тяжести, шарики попадают в специальные звуковые трубки, которые в результате издают забавные звуки разной тональности.
Новые элементы механизации и звуковые устройства в уже знакомом вам наборе «Динамика» позволяют строить разные удивительные маршруты для шариков. Скатываясь вниз под действием силы тяжести, шарики попадают в специальные звуковые трубки, которые в результате издают забавные звуки разной тональности.
Еще одним новым элементом в этом наборе является спиральная воронка, направляющая шарики по замысловатой траектории.
В комплект входят: воронка – 1 шт., звуковые трубки – 3 шт., стрелочный механизм – 1 шт., желоб 90 мм – 4 шт., желоб 180 мм – 14 шт., стальной шарик – 8 шт.
Варианты для расширения возможностей: Мотор XS, Набор Звук и Свет, Аккумуляторный набор, Набор с блоком питания, Набор светодиодов.
Набор для тюнинга конструктора Динамика
 Комплект деталей для расширения возможностей наборов серии «Динамика» М, L, XL и «Веселые горки». В перечень деталей входят: специальные угловые элементы, улавливающие воронки, короткие и длинные желобки. С помощью этого комплекта маленькие инженеры смогут реализовать все свои фантазии в области строительства маршрутов для шариков.
Комплект деталей для расширения возможностей наборов серии «Динамика» М, L, XL и «Веселые горки». В перечень деталей входят: специальные угловые элементы, улавливающие воронки, короткие и длинные желобки. С помощью этого комплекта маленькие инженеры смогут реализовать все свои фантазии в области строительства маршрутов для шариков.
В комплект входят: стрелочный механизм – 2 шт., воронка – 2 шт., магнитные захваты – 2 шт., стальные шарики – 6 шт., желоб 90 мм – 4 шт., желоб 180 мм – 10 шт.,
Набор отлично сочетается с конструкторами: Динамика М, Динамика L, Динамика XL, Веселые горки.
Набор светодиодов
 Набор из четырех светодиодов можно использовать для добавления световых эффектов в ваши конструкции. В набор входят два цветных светодиода, которые мигают меняя свой цвет, и два белых светодиода.
Набор из четырех светодиодов можно использовать для добавления световых эффектов в ваши конструкции. В набор входят два цветных светодиода, которые мигают меняя свой цвет, и два белых светодиода.
Состав набора: цветные светодиоды – 2 шт., белые светодиоды – 2 шт., контейнер для батарейки 9 В.
Варианты для расширения возможностей: Аккумуляторный набор, Набор с блоком питания.
Основы пневматики
 Новый недорогой комплект «Основы пневматики» отлично подходит для первого знакомства с основами пневматики. С его помощью дети изучат поведение пневматических систем, играя с моделями, которые можно собрать из этого конструктора. Они узнают, как работает насос, цилиндры и ручные распределители.
Новый недорогой комплект «Основы пневматики» отлично подходит для первого знакомства с основами пневматики. С его помощью дети изучат поведение пневматических систем, играя с моделями, которые можно собрать из этого конструктора. Они узнают, как работает насос, цилиндры и ручные распределители.
Сжатый воздух нагнетается в пневмосистему с помощью ручного насоса. Затем он поступает в пневматические цилиндры, которые приводят в движение различные механизмы. Для распределения сжатого воздуха используются маленькие ручные клапаны.
Из набора можно собрать экскаватор и еще три движущиеся модели. Ответы на интересующие вопросы вы найдете в мини-учебнике, который скоро можно будет скачать на нашем сайте.
В комплект входят: пневматические цилиндры – 2 шт., элементы поршневого насоса, ручные клапаны– 2 шт.
Солнечные машины
 Возобновляемые источники энергии занимают все большую долю в области производства электроэнергии. В новом наборе «Солнечные машины» солнечная батарея используется для питания микромотора, который приводит в движение маленькую лодку или автомобиль.
Возобновляемые источники энергии занимают все большую долю в области производства электроэнергии. В новом наборе «Солнечные машины» солнечная батарея используется для питания микромотора, который приводит в движение маленькую лодку или автомобиль.
Играя с моделями, которые можно собрать из этого конструктора, дети познакомятся с солнечной энергетикой. Они увидят, как солнечный свет преобразуется в электричество и далее в движение моделей, которые они собрали своими руками.
Из набора можно построить настоящий катамаран с солнечной батареей и лодку с гребными колесами. Кроме этих моделей вам предлагается собрать солнечный автомобиль и вентилятор. Ответы на интересующие вопросы вы найдете в мини-учебнике, который можно скачать на нашем сайте.
В комплект входят: солнечная батарея (2 В, 200 мА), микромотор (2 В) и пенопласт для лодки.
Мини-боты
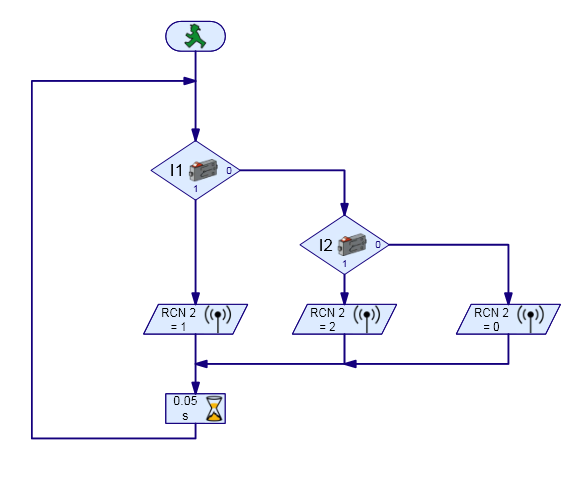
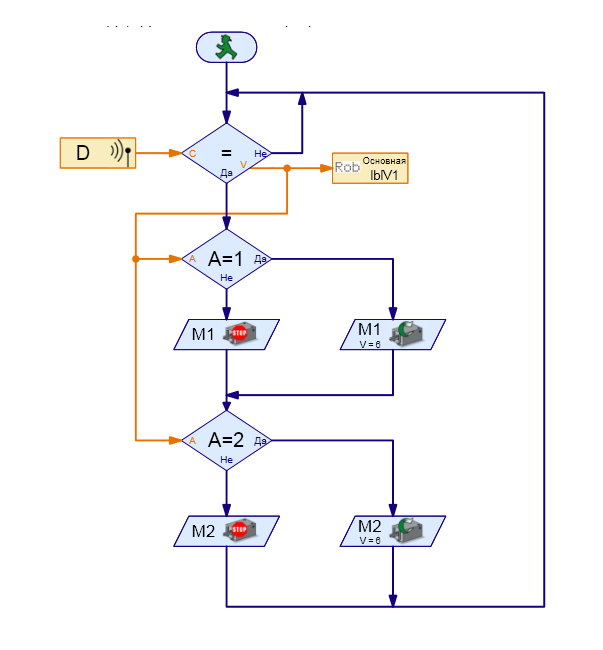
 «Мини-боты» – новый конструктор из серии РОБОТОТЕХНИКА, предназначенный для знакомства с миром робототехники. В маленьких мобильных роботах, которых дети собирают из этого набора, для управления используется электронный модуль с заранее подготовленными программами, прошитыми во флеш-память. Переключение между программами выполняется с помощью DIP-переключателя. Кстати, точно такой же модуль имеется в наборе «ПРОФИ Электроника».
«Мини-боты» – новый конструктор из серии РОБОТОТЕХНИКА, предназначенный для знакомства с миром робототехники. В маленьких мобильных роботах, которых дети собирают из этого набора, для управления используется электронный модуль с заранее подготовленными программами, прошитыми во флеш-память. Переключение между программами выполняется с помощью DIP-переключателя. Кстати, точно такой же модуль имеется в наборе «ПРОФИ Электроника».
Из набора вы сможете собрать трёх проворных роботов разного типа и провести с ними забавные эксперименты. Мини-боты умеют бегать по линии и объезжать препятствия, встречающиеся на пути. В качестве органов чувств мини-ботов предлагается использовать оптический датчик маршрута и кнопки.
В комплект входят: электронный модуль управления – 1 шт., ИК-датчик маршрута – 1 шт., кнопки – 2 шт., мотор XS – 2 шт., контейнер для батарейки 9В – 1 шт.
Следите за появлением новинок 2015 года на нашем сайте. Уже сейчас новые наборы FISCHERTECHNIK можно заказать в нашем интернет-магазине pacpac.ru.
Весь товар поставляется исключительно от производителя, благодаря чему мы можем гарантировать высокое качество и сертификацию каждого набора.
Доставка конструкторов FISCHERTECHNIK осуществляется в любой город и населенный пункт России и стран ТС. Жители Москвы могут воспользоваться функцией самовывоза товара с нашего склада или из пунктов самовывоза в Москве и Санкт-Петербурге.